MMSx Authority | Institute for Movement Mechanics & Biomechanics Research
MMSx Research Team
Under the guidance of Dr. Neeraj Mehta (PhD)
Founder & Editor-in-Chief, JMMBS
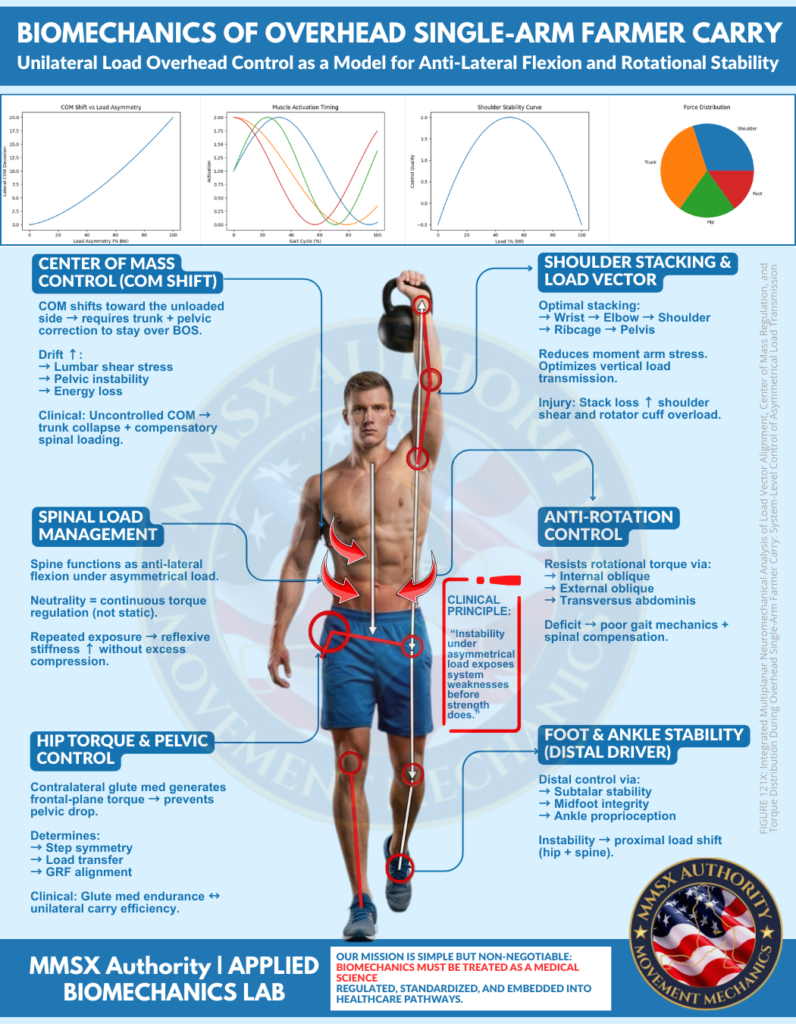
Biomechanics of Overhead Single-Arm Farmer Carry: A Force–Vector and System Integrity Analysis under Asymmetrical Loading
MMSx Authority | Institute for Movement Mechanics & Biomechanics Research
Abstract
The overhead single-arm farmer carry represents a high-demand locomotor task involving unilateral load placement, vertical force transmission, and continuous multi-segmental stabilization. Unlike traditional bilateral loading patterns, this task introduces asymmetrical torque, lateral center of mass displacement, and rotational perturbations that must be regulated in real time.
This article reframes the overhead carry not as a strength exercise, but as a system-level diagnostic model for evaluating neuromechanical control, vector alignment, and load management capacity. Within the MMSx framework, movement is governed by force-direction logic, moment arm behavior, and compensatory redistribution across the kinetic chain.
The carry exposes whether the system can maintain mechanical efficiency under asymmetry—or whether compensation replaces control.
1. Reframing the Task: From Exercise to System Test
The overhead single-arm farmer carry is often programmed as a shoulder stability or core strengthening drill. This interpretation is incomplete.
Under MMSx analysis, the task imposes:
- Unilateral vertical load
- Lateral displacement of center of mass (COM)
- Rotational torque across the axial skeleton
- Dynamic gait integration under asymmetry
The system must continuously regulate:
- Load vector alignment
- Segmental coordination
- Torque dissipation
- Base-of-support control
This is not a static hold. It is a moving instability field.
2. Center of Mass Regulation under Asymmetrical Load
When load is placed overhead on one side, the system experiences a lateral shift in COM relative to the base of support.
The body must generate corrective strategies through:
- Trunk lateral control
- Pelvic repositioning
- Foot-ground interaction
If COM drifts beyond controllable thresholds:
- Lumbar shear forces increase
- Pelvic alignment becomes unstable
- Energy cost rises due to inefficient correction
From an MMSx standpoint, COM is not a positional variable.
It is a continuously regulated mechanical output.
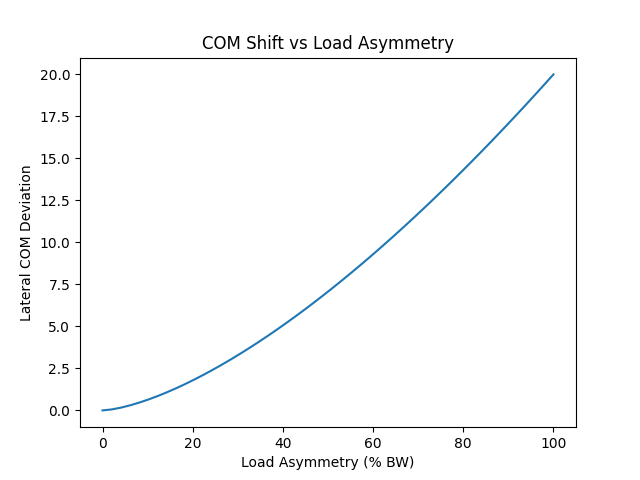
FIGURE 121X-A: Lateral Center of Mass Shift Under Unilateral Overhead Loading
3. Shoulder Stacking and Vertical Load Transmission
The overhead position demands alignment across:
→ Wrist → Elbow → Shoulder → Ribcage → Pelvis
This stacking reduces horizontal moment arms and allows efficient vertical force transmission.
Loss of stacking results in:
- Increased shoulder shear
- Rotator cuff overload
- Energy leakage through compensatory patterns
The shoulder does not fail in isolation.
It fails when the system cannot maintain vertical vector integrity.
4. Anti-Rotation and Anti-Lateral Flexion Mechanics
Unilateral overhead loading introduces rotational torque around the longitudinal axis.
The trunk must resist this via coordinated activation of:
- Internal obliques
- External obliques
- Transversus abdominis
Simultaneously, the system must resist lateral flexion through:
- Quadratus lumborum
- Obliques
- Deep spinal stabilizers
Failure in these roles leads to:
- Gait asymmetry
- Trunk deviation
- Compensatory spinal loading
The trunk is not a “core.”
It is a torque regulation system.
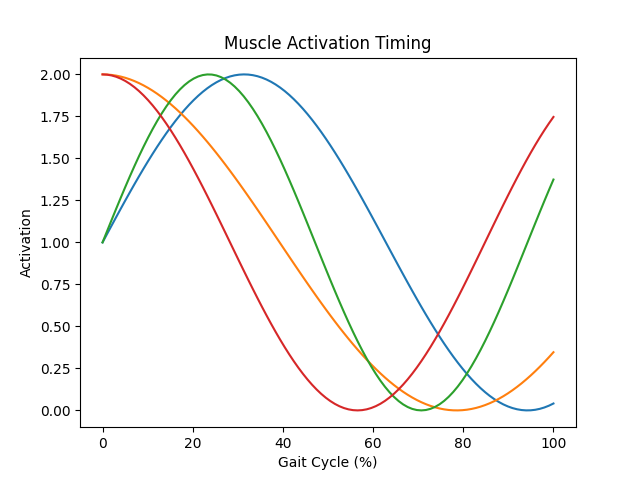
FIGURE 121X-B: Neuromuscular Sequencing During Overhead Unilateral Carry
5. Hip Torque and Pelvic Stability
The contralateral gluteus medius plays a critical role in maintaining frontal-plane stability.
Its function includes:
- Preventing pelvic drop
- Stabilizing stance phase
- Supporting COM control
Deficits result in:
- Step asymmetry
- Inefficient load transfer
- Increased reliance on spinal compensation
Hip function is not secondary.
It is a primary stabilizing anchor under asymmetry.
6. Distal Stability and Proximal Consequences
The foot and ankle act as the first point of interaction with the ground.
They regulate:
- Subtalar motion
- Midfoot stiffness
- Proprioceptive feedback
Distal instability leads to:
- Poor ground reaction force (GRF) alignment
- Increased proximal demand
- Compensatory loading at hip and spine
MMSx principle:
Distal inefficiency propagates proximally.
7. Load–Control Relationship and Stability Thresholds
As load increases:
- Stability initially improves (adaptive response)
- A peak control threshold is reached
- Beyond this, control declines
This defines:
- Optimal loading zone → efficient regulation
- Instability zone → compensation dominance
Training must identify and operate within this transition—not exceed it blindly.
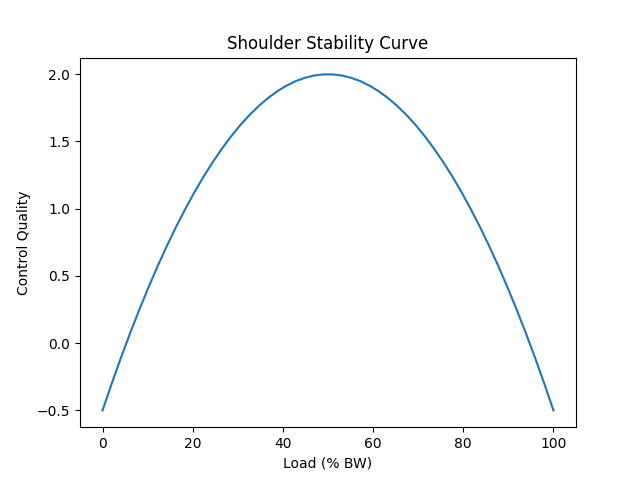
FIGURE 121X-C: Shoulder Stability as a Function of Load and Control Capacity
8. Compensation as a Mechanical Strategy
Compensation is not dysfunction.
It is a load redistribution mechanism.
When primary structures fail:
- Load shifts across the kinetic chain
- Alternative pathways are used
- Efficiency decreases
Common compensations in overhead carry include:
- Lateral trunk lean
- Rib flare
- Pelvic shift
- Shoulder drift
The question is not whether compensation occurs.
The question is where and why it occurs.
9. Clinical and Performance Implications
The overhead single-arm farmer carry can be used to:
Assess:
- Anti-rotation capacity
- Frontal-plane stability
- Load vector control
- Gait symmetry under asymmetry
Train:
- Integrated system stability
- Dynamic spinal control
- Efficient load transfer
Identify:
- Weak links in the kinetic chain
- Thresholds of mechanical failure
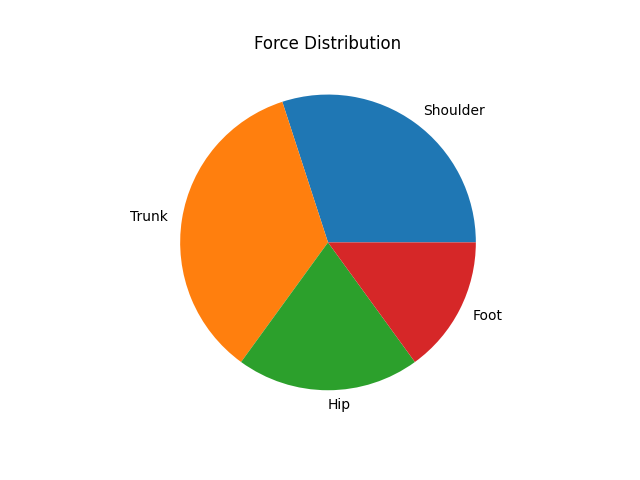
FIGURE 121X-D: Relative Contribution of System Components in Overhead Unilateral Carry
10. MMSx Clinical Principle
Instability under asymmetrical load exposes system weaknesses before strength does.
Strength can mask inefficiency.
Instability reveals it.
11. MMSx Authority Position
Biomechanics must move beyond posture-based instruction.
It must be understood as:
- Force-vector regulation
- Torque management
- Capacity-based progression
- System-wide coordination
The overhead carry is not an accessory exercise.
It is a mechanical interrogation of the system.
Conclusion
The overhead single-arm farmer carry is a high-value movement within both performance and rehabilitation contexts—not because of the load it carries, but because of the demands it imposes on the system.
It exposes:
- Whether the body can maintain alignment under asymmetry
- Whether torque can be controlled across segments
- Whether force can be transmitted efficiently
From an MMSx perspective, the goal is not to hold position.
The goal is to regulate deviation under load.
References
- McGill, S.M. (2007). Low Back Disorders: Evidence-Based Prevention and Rehabilitation. Human Kinetics.
- McGill, S.M. (2010). Core training: Evidence translating to better performance and injury prevention. Strength & Conditioning Journal.
- Kibler, W.B., et al. (2013). The role of the scapula in athletic shoulder function. American Journal of Sports Medicine.
- Hodges, P.W., & Richardson, C.A. (1997). Contraction of the abdominal muscles associated with movement of the lower limb. Spine.
- Zazulak, B.T., et al. (2007). Deficits in neuromuscular control of the trunk predict knee injury risk. American Journal of Sports Medicine.
- Gribble, P.A., et al. (2012). Evidence review for balance training and postural control. Journal of Athletic Training.
- Lee, D., & Lee, L.J. (2011). Clinical stability of the lumbopelvic region. Manual Therapy.
- Neumann, D.A. (2010). Kinesiology of the Musculoskeletal System. Elsevier.
- Winter, D.A. (1995). Human balance and posture control during standing and walking. Gait & Posture.
- Vera-Garcia, F.J., et al. (2007). Trunk muscle activation during stabilization tasks. Journal of Applied Biomechanics.
I
Leave a Reply